デザイン未経験でも大丈夫!Meshy AIで始める3Dデータ販売の新しい在宅副業
swiftwand swiftwand.ai
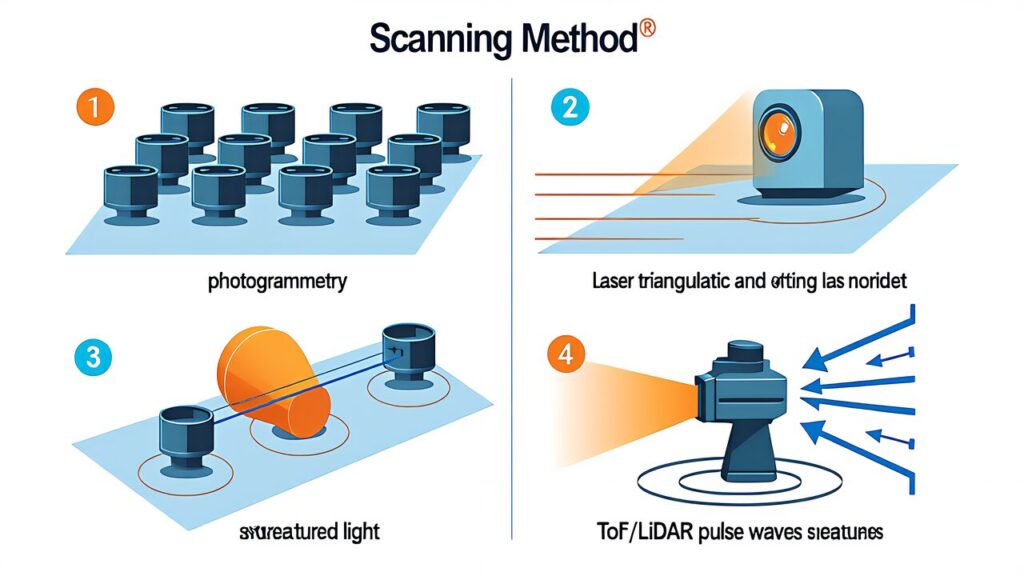
3Dスキャン 入門の最大の障壁は、「方式が多すぎて意思決定できないこと」だ。フォトグラメトリ、構造光、レーザー三角測量、ToF/LiDAR、そして2024年以降急速に普及したGaussian Splatting。各方式の物理原理を理解しないまま機材を選べば、「フィギュアを撮りたかったのに精度が足りない」「機械部品を測りたかったのに反射で使えない」という典型的な失敗が待っている。スマホアプリの「無料」「LiDAR搭載」「AI補正」というキャッチコピーに惹かれて買ったが、実際の精度は予想と全く違った——という声を、本シリーズの企画段階で何度も耳にした。本記事では、3Dスキャン 入門者が方式選定で迷わないための判断軸を、物理原理レベルで整理する。

「3Dスキャナー」と呼ばれる機材は、原理が根本的に異なる4〜5系統に分かれる。にも関わらず、ECサイトのレビュー欄では「精度0.05mm」「±1cm」「サブミクロン」といった数字が文脈なく並ぶ。スマホLiDARの「±1cm」と構造光スキャナーの「0.05mm」は、対象物のスケール・距離・素材が違えば100倍以上の差が現実になる。
3Dスキャン 入門者がまず捨てるべき幻想は「とにかく精度が高い方式が良い」という発想だ。建築規模を測りたい人にサブミクロン精度の卓上構造光は無意味だし、フィギュア複製にToF/LiDARを使えば形状は丸まる。方式は対象物のスケール・素材・運用に従って選ぶ——これが本記事の出発点である。
3Dスキャンは、まず接触式と非接触式に分類される。接触式は工作機械のCMM(座標測定機)プローブが代表で、本記事の対象外だ。非接触式は、対象物に自分でエネルギーを当てて反射を測る能動的(Active)方式と、周囲光を受動的に観測する受動的(Passive)方式に大別される(出典: Wikipedia “3D scanning”)。これがすべての3Dスキャン 入門の基礎となる。
フォトグラメトリ(Photogrammetry)は、対象物を多視点から撮影した画像群から3D形状を再構成する受動的方式だ。アルゴリズム的にはStructure from Motion(SfM)でカメラ位置を推定し、Multi-View Stereo(MVS)で密な点群を生成する2段階処理で動作する。SfMは画像間の特徴点対応からカメラ位置・姿勢・スパースな点群を同時推定し、続くMVSが密な深度マップを生成して結合する。COLMAP(オープンソースSfM/MVSパイプライン、2026年も活発に開発継続)はこの分野のデファクト実装基盤で、AliceVision・Metashape・RealityCaptureの内部実装も理論的にはこの2段階を踏襲している。
光源を自分で出さないため、テクスチャ(色情報)が極めてリッチになる一方、幾何精度は撮影条件と特徴点密度に強く依存する。査読論文「Methodology of Object Reconstruction by Photogrammetry and Structured-Light Scanning for Industrial 3D Visualisation」(MDPI Sensors, 2025)は、フォトグラメトリは「相対誤差10%以上のスケールドリフトと幾何ノイズ」を抱えると報告している。建築物・大規模地形では10〜50mmで十分実用、対象物が小さく特徴点豊富であれば数mm精度も可能だが、反射面・無特徴面・透明素材で破綻する点が共通の弱点だ。撮影段階での画像重複率(70%以上推奨)、照明の均一性、カメラの解像度・レンズ特性が直接精度を左右するため、「機材より撮影設計」が成否を分ける。
代表ソフトウェアは、無料の Meshroom(AliceVisionフレームワーク、ノードベース、CUDA要)、有料の Agisoft Metashape(Standard $179、Pro $3,500)、そして年間売上$1M未満の事業者には無料の RealityCapture(Capturing Reality / Epic Games)の3強体制が2026年も継続している。RealityCaptureはGPU最適化により大量画像処理が高速で、Metashapeはアカデミック・地形マッピング用途で安定した品質を出し、Meshroomはオープンソースのため改造・カスタマイズが効く。3つの選択は「処理速度・GUI完成度・改造自由度」のトレードオフである。
構造光は、対象物に既知の縞模様や格子パターンを投影し、撮影画像に映ったパターンの歪みから三角測量で形状を再構成する能動的方式である。LED光源を用いるためレーザー安全性の心配がなく、投影パターンを工夫すれば1回の撮影で広範囲を高密度取得できる。
精度は民生機で 0.01〜0.3mm のレンジに収まる(出典: 業界レンジ調査、3DMakerpro Seal仕様)。Modern Machine Shop の「Understanding Structured Light Scanning Measurements」によれば、専門機は 0.05〜0.1mm がスタンダード、ハイエンド機では2フィート幅で10μmの平面性精度を出す例もある。
構造光の中でもさらに技術が分岐している。代表的なのが位相シフト法(Phase Shift / Fringe Projection Profilometry, FPP)で、複数の正弦波縞パターンを少しずつずらしながら(典型的には3〜10ショット)撮影し、画素ごとの位相を解いて深度を求める。Phase Shift法は「縞ピッチの1/10」の解像度に到達でき、ノイズ・周囲光変動への耐性も高いため、産業用構造光スキャナーの主流となっている(出典: Optics & Photonics「Structured-light 3D surface imaging: a tutorial」)。一方、単一パターンで瞬時取得するSingle-Shot方式(Gray Codeや擬似ランダムドット)は、移動物・動物・人体スキャン向けに最適化される。民生機ではこれらが組み合わされている場合が多く、製品カタログの「マルチショット」「ハイブリッド」表記の実体はここに帰着する。
一方の弱点は明確だ。構造光は 対象物が静止していないと誤差が累積する(複数枚のパターン投影を時系列で行うため)。さらに反射面・暗色面・透明素材には弱く、屋外の強い周囲光下での精度低下も避けられない。フィギュア・小型機械部品・人体スキャンといった静止可能な中型物体が最適領域である。
レーザー三角測量は、レーザー点もしくはレーザーラインを対象物に照射し、オフセット位置のカメラで光点位置を検出して三角測量する方式だ。原理は構造光と類似だが、光源がレーザー(単一波長・指向性高)であることで、いくつかの本質的差異が生まれる。
LMI Technologiesの技術ブログによれば、ハンディ型レーザー三角測量機は単スキャンで 0.02mm の精度を出す例があり、反射面・暗色面の許容度が構造光より高い。レーザー光は狭帯域フィルタで周囲光を排除できるため、屋外・工場現場のような明るい環境にも強い。さらに走査速度が速いため、コンベア上を流れる動的対象の検査にも使える。
弱点は、サブミクロン領域でのスペックル(レーザー干渉ノイズ)と、人の目への安全配慮だ。サブミクロン計測では構造光の方が優位な領域がある。
レーザー方式の中でも、点レーザー走査(1点ずつ高速走査)とラインレーザー走査(直線状の光をスキャン)に分かれる。点レーザーは単点測定の精度を極限まで高められるが取得点数は少なく、ラインレーザーは速度と密度のバランスが良いため民生ハンディ機の主流だ。Creality CR-Scan系の上位機種、Faro Edge ScanArm、Leica AbsoluteScannerなどが代表例で、産業現場の品質管理用途で広く使われている。
ToF(Time-of-Flight)とLiDAR(Light Detection and Ranging)は、ともに「光が往復する時間」から距離を求める方式である。技術的にはLiDARはToFの一種で、レーザー光源を使うものを LiDAR と呼ぶ慣習が定着している(出典: tofsensors.com、RF Wireless World)。コンシューマー文脈でAppleが「LiDAR Scanner」と呼ぶのはマーケティング表記だが、原理的にはToFの応用である。
iPhone LiDARの実測精度は、Nature Scientific Reports(2021、iPhone 12 Pro評価論文)で 小型物体(10cm以上)で±1cmの絶対精度、130m級の海岸地形で±10cmと報告された。室内静的取得では RMS 2.84cm(タンドフォンライン論文)、建築規模では 95%信頼区間で10〜20cm(iPhone 13 Pro比較研究)が目安だ。範囲は 約5m(Apple iPad Proの仕様記載)が公式基準である。
iPhone 17 Pro / Pro Max(2025年9月19日発売)でもLiDARモジュールは継続搭載されているが、Dot3D等のテストレポートでは iPhone 15 Pro Max 比でスキャン用途の有意改善は確認できないとの指摘もある。Apple側もLiDARの主用途を「ARフォーカス補助」「低照度オートフォーカス」に置いており、計測機材としての絶対精度向上はマーケティング訴求点に含まれていない。
文脈を補足すると、自動運転車や産業測量のロングレンジLiDAR(Velodyne、Ouster、Hesai等)は数百m〜数kmの距離計測を行い、点群密度・精度ともにスマホLiDARとは別次元だ。これらは数百万円以上の機材で、3Dスキャン 入門者の選択肢には入らない。一方のToF+IR光源を採用するスマホ・タブレット系は、数mの近距離で空間把握・小物体記録に特化している。同じ「LiDAR」「ToF」という言葉でも、適用スケールと精度クラスは大きく異なる点に注意が必要だ。
3D Gaussian Splatting(3DGS)は2023年SIGGRAPHでKerbl らが発表した手法で、シーンを 3D楕円体(Gaussian)の集合として表現し、リアルタイムレンダリングを可能にした。2026年現在、Polycam、KIRI Engine、Luma AI 等のスマホアプリが対応し、フォトグラメトリの後継として注目を集めている。
技術的にはGaussian Splattingは「ボリュメトリックな放射輝度場(NeRFの後継)を、明示的な粒子として保存する」という発想の転換だ。NeRFが暗黙の関数(ニューラルネットワーク)でシーンを表現するのに対し、3DGSは何百万個もの楕円体ガウシアンを座標と色で持ち、レンダリングがリアルタイム(数十〜数百FPS)で動く。これにより、VR/AR・ゲームエンジン(Unity、Unreal Engine)への直接統合が現実になり、Polycamも公式にGaussian SplatのUnity / Unreal連携を提供している。
ただし、3Dスキャン 入門としての実情を述べるなら、Gaussian Splatting単体では3Dプリント可能なメッシュ(STL)を直接出力しない。これはレンダリングのための表現形式であり、メッシュ抽出は別段階の研究領域だ。SuGaR(Surface-Aligned Gaussian Splatting, CVPR 2024) は3DGSにメッシュ整列の正則化項を加え、Poisson再構成で 単GPUで数分のメッシュ抽出 を実現した(arXiv:2311.12775)。さらに 2D Gaussian Splatting(2DGS) は3D楕円体を2D平面に近似してクロスビュー幾何整合性を高める手法で、Eurographics 2026採択の GS-2M(Material-aware Gaussian Splatting) はマテリアル情報をメッシュ再構成に組み込むなど、毎年メッシュ品質改善が続いている。
つまり、2026年の Gaussian Splatting は「研究段階から早期実用への移行期」にある。Polycamは Gaussian Splat(PLY)と GLTF/STL メッシュの両方を出力できるが、メッシュ品質は構造光やレーザー三角測量に届かない場合が多い。まず3DGS でビジュアル取得 → 必要に応じて構造光で再スキャン という二段構えが、2026年の実務的アプローチである。3Dプリント前提なら、現状はGaussian Splattingを「主役の表現形式」とせず、フォトグラメトリ・構造光のメッシュ品質を優先する判断が安全だ。
| 項目 | フォトグラメトリ | 構造光 | レーザー三角測量 | ToF / LiDAR | Gaussian Splatting |
|---|---|---|---|---|---|
| 分類 | 受動的 | 能動的 | 能動的 | 能動的 | 受動的(画像ベース) |
| 光源 | 周囲光 | LEDパターン | レーザー(点/ライン) | パルスレーザー/IR | 周囲光 |
| 民生機の典型精度 | 数mm〜数十mm(条件依存) | 0.01〜0.3mm | 0.02mm〜数mm | 5cm〜20cm(スマホLiDAR) | 中精度(メッシュ品質はSuGaR等の手法に依存) |
| 速度 | 撮影は速い/処理に時間 | 数秒〜数分 | 数秒〜数分 | リアルタイム | 撮影は速い/処理に時間 |
| 素材対応 | 反射・無特徴・透明に弱い | 反射・暗色に弱い | 反射・暗色に比較的強い | 反射・暗色に弱め | フォトグラメトリと類似 |
| 静止/移動 | 静止前提 | 静止前提 | 移動可能(ライン式) | 移動可能 | 静止前提 |
| 屋外光 | 強い(周囲光ベース) | 弱い | 強い(狭帯域フィルタ) | 中 | 強い |
| 代表ソフト/機材 | Meshroom / Metashape / RealityCapture | Artec, EinScan, Revopoint | Creality CR-Scan系, Faro | iPhone Pro / iPad Pro | Polycam, KIRI Engine, Luma AI |

3Dスキャン 入門での意思決定は、対象物のスケールと素材から逆算する。
フィギュア・小型機械部品(〜30cm、精密): 構造光ハンディ機が第一選択で、Phase Shift対応機なら0.05mm前後の精度で表面ディテールまで取得できる。レーザー三角測量機は黒色プラスチック・金属パーツなど反射素材を扱う場合に優位。スマホLiDARは精度不足、フォトグラメトリは特徴点が無い面(メタリック塗装等)で破綻する。
人体・動物(30cm〜2m、有機形状): 構造光(マルチショット式)または高速レーザー三角測量。スキャン中の微動補正のため、複数フレームのリアルタイム合成機能が必須。Revopoint MIRACO 2、Artec Eva、Einstar Vega などはこのカテゴリで実績がある。被写体への光照射に配慮(赤ちゃん・ペットの目への配慮等)が必要。
屋外建築・地形・大型彫像(2m〜100m): フォトグラメトリ(ドローン撮影)または ToF/LiDAR。スマホLiDARは10〜20cmの精度で記録写真用途には十分だが、建築物の構造調査には地上レーザースキャナー(テレストリアルレーザースキャナー、TLS)が必要となる。Faro Focus、Leica BLKシリーズ、Z+F Imager等が業界標準だが価格は数百万円〜。
室内空間・部屋全体(数m): スマホLiDAR(iPhone Pro)が最も手軽。RTAB-Map等のSLAMアプリで定常マップ生成も可能。不動産業の物件記録、リフォーム前計測、簡易IFCモデル作成には十分実用域。
ビジュアル素材(ゲーム・VFX・記録): Gaussian Splatting がレンダリング品質で頭一つ抜ける。3Dプリント目的でなければ、Polycam / Luma AI で十分実用。Unity・Unreal Engineへの直接統合を見据えるなら、Gaussian Splat(PLY)形式が事実上の業界標準になりつつある。

2024年から2026年にかけての3Dスキャン業界は、民生帯と専門帯の境界が崩壊した2年間だった。まず、Apple iPhone Pro系のLiDARが2020年から継続搭載され、無料アプリ群(Polycam、Scaniverse、KIRI Engine)と組み合わせるだけで、室内空間・小物体記録のレベルが一気に「研究室の試作」から「日常の表現手段」に移行した。
次に、Gaussian Splattingが2023年〜2024年に研究界から実装界に降りてきた。SuGaR(CVPR 2024)で「数分でメッシュ抽出」が現実になり、Polycamが2024〜2025年に商用アプリへ統合した。レンダリング品質では、フォトグラメトリの「テクスチャは綺麗だが幾何が荒い」という積年の課題が、Gaussian Splattingの「粒子表現で連続的レンダリング」という別解で乗り越えられつつある。
第三に、ハンディ構造光・レーザー三角測量機の価格競争が加速した。Revopointは10万円帯のPOPシリーズから、20〜30万円帯のRange/MIRACO系へと製品ラインを拡張し、3DMakerproが「世界初の0.01mm精度コンシューマー機」Sealを投入。Creality・SHINING 3Dも参入し、かつて100万円以上だった精度を10万円台で買える時代が到来した。詳細な機種比較は ハンディ 3Dスキャナー 選び方 2026 で扱う。
これら3つの動きが重なった結果、2026年の3Dスキャン 入門は「研究者の道具」ではなく「メイカー・小規模事業者の標準装備」に近づいた。同時に、選択肢が増えたぶん方式選定の難度は逆に上がった——本記事の存在意義はここにある。
2026年は3Dスキャン 入門のハードルが急激に下がった年だ。iPhone Pro系のLiDARは2020年(iPhone 12 Pro)から継続搭載され、iPhone 17 Pro / Pro Max(2025年9月発売)まで6世代分の知見が蓄積されている。Polycam・Scaniverse・KIRI Engine・RealityScan の4大スマホアプリが、無料枠でも十分な品質を提供し、有料プラン(PolycamのProサブスクリプション、商用利用可能化)への移行も整備された。
一方で、スキャナーメーカー間の精度競争も終わっていない。3DMakerpro Seal が「世界初の0.01mm精度コンシューマー機」を謳う一方、Hexagon やArtec の専門機は10μm平面性・2μm垂直精度という別次元を維持している。価格帯の壁(民生機10〜30万円、専門機100万円〜)は依然として明確だ。
Gaussian Splatting の実用化は、SuGaR・2DGS・GS-2M といった研究の成熟が鍵を握る。2026年はまだ「研究から早期商用への移行期」であり、3Dプリント目的の精度を求めるなら構造光・レーザー三角測量を併用する二段構えが現実解だ。
手1: スマホで試す(投資ゼロ): iPhone Pro系を持っていれば Polycam の無料プラン(150枚/キャプチャ、GLTF出力)で試行。LiDAR搭載機種でないAndroidユーザーは KIRI Engine(フォトグラメトリ+Gaussian Splatting)。詳細は スマホ 3Dスキャン 2026完全比較 で扱う。
手2: ハンディ機を導入(10〜30万円): 構造光またはレーザー三角測量のハンディ機。Revopoint MIRACO 2、Creality CR-Scan Raptor X、SHINING 3D Einstar Vega が民生帯の主役。詳細は ハンディ 3Dスキャナー 選び方 2026 で機種比較する。
手3: スキャンデータを印刷可能STLに: スキャンの生データはほぼ確実に「印刷不可能」だ。AI メッシュ修復(Meshy Remesh、MeshLab、hyper3d)と、スライサーでの中空化・サポート最適化は別途学ぶ必要がある。詳細は AI メッシュ修復 完全ガイド 2026 と 3Dスキャン プリント変換 実践 で深掘りする。

ここ2年で急成長した Text-to-3D や Image-to-3D (Meshy、Tripo、3D生成AIファウンデーションモデル)と、本記事で扱う「現実スキャン」はしばしば対立軸として語られるが、実務的には補完関係にある。生成AIは「世にない造形」(オリジナルキャラクター、想像上のオブジェクト、コンセプトアート由来の形状)を作るのが得意で、現実スキャンは「既にある物体の正確な複製・記録」が得意だ。
たとえば「壊れた工業部品の代替品を3Dプリントしたい」場合、生成AIで作っても実物に合わない。スキャンが正解だ。逆に「自分のキャラクターをフィギュア化したい」場合、現実スキャンする原型が無いのだから生成AIが正解だ。「複製したいか、創造したいか」——この一点で方式が分かれる。3D生成AIファウンデーションモデルの体系的解説は 3D生成AI ファウンデーションモデル 2026最前線 を参照されたい。

3Dスキャン 入門で重要なのは精度の数字を比べることではなく、対象物のスケール・素材・運用が、どの物理原理に適しているかを見極めることだ。フィギュアと建築では必要な方式が違う。反射面と無特徴面では使えるツールが変わる。Gaussian Splatting はレンダリング用途では強力だが、印刷可能STLへの直結はまだ研究段階だ。スマホLiDARの「±1cm」と構造光の「0.05mm」は対象物のスケールが違えば100倍以上の差を生むが、用途が一致していればどちらも「ちょうどいい」道具になる。
「3Dプリンターを買って、次に欲しくなった3Dスキャナー」という出発点なら、まずスマホで試し、満足できなければハンディ構造光機に進むのが2026年のセオリーである。生成AI(Text-to-3D)と現実スキャンの使い分けも、本シリーズで一貫して扱う。スマホ3Dスキャン比較以降では、スマホアプリ比較(Polycam/KIRI Engine/Scaniverse/RealityScan)、ハンディ機4機種比較、AI メッシュ修復、印刷変換、文化財復元、そして総括ロードマップへと続く。3Dスキャン 入門の旅は、ここから始まる。
この記事は本シリーズの初回です。続編は スマホ 3Dスキャン 2026完全比較 で公開予定。